我們已經能夠減少儀器中的漂移和噪聲到如此程度,以至於我們可以看到分子通過比自身直徑還小的間距時的細微運動……[T]這些實驗在15年前才實現。
——史蒂夫·勃洛克,斯坦福大學生物科學與物理應用教授
試想一下,在對計算機一無所知的情況下,我們如何去逆向設計它(「黑匣子」的方法)。首先,我們可以把周圍裝上磁性傳感器陣列。我們會注意到,在更新數據庫操作期間,重要的活動正在某一特定電路板上進行著。我們很可能會注意到,在這些操作進行時,硬盤上同樣也有行動。(實際上,仔細聽硬盤的轉動一直是觀察計算機運行的一個簡單辦法。)
我們可以再推論說,該磁盤與存儲數據庫的長期記憶有很大關聯,並且在將數據轉換成存儲的操作中,這些電路板也在活動。這就近似地告訴我們,這些操作發生的地點和時間,但對於任務是如何完成的,並沒有多大的關聯。
如果計算機的寄存器(臨時內存的位置)連接到前板燈(這一點與早期計算機的情況類似),我們將看到燈以某種模式在閃爍,這些顯示了電腦在分析數據時寄存器狀態的迅速變化,但在計算機的數據傳輸時,變化則相對緩慢。我們也許可以進而推論說,這些燈反映了進行分析時的邏輯狀態變化。這種觀點是準確的,但並未進行修飾,並不能為我們提供一個行動理論,或是類似信息實際編碼以及變換一樣的觀點。
以上描述的假設情形在歷史上已有反映,人類已經開始利用簡陋工具對大腦進行掃瞄和建模,這些努力都起了作用。基於當代腦掃瞄研究的大多數模型(如利用fMRI、MEG等方法,還有一些將在接下來的內容中討論)顯示出了底層的機制。雖然這些研究有價值,但它們低下的時空分辨率不足以完成大腦逆向工程所要表現出的人類大腦的顯著特點。
大腦掃瞄的新工具。現在設想一下,前面關於計算機的例子,我們能夠真正地將精密的傳感器放到電路的特定點上,而這些傳感器能夠以非常高的速度跟蹤信號。我們現在有必要採用記錄實時改變信息的工具,以便詳細描述一個真正的電路工作過程。事實上,這與電氣工程師究竟如何去理解和調試有關,如計算機電路板(例如逆向設計競爭對手的產品),可以使用可視化的計算機信號進行邏輯分析。
神經科學還沒有使用可以進行這種分析的傳感器技術,但這種情況即將改變。對等進入大腦的工具正在以指數速度發展。如圖4-1所示,這種無創大腦掃瞄設備的分辨率大約每12個月增加一倍(每單位體積)。31
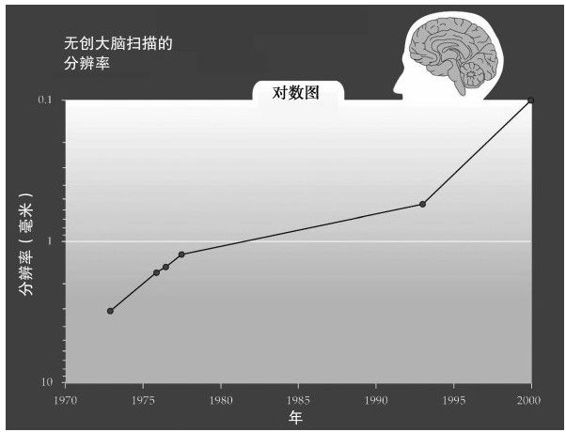
圖 4-1
隨著大腦掃瞄圖像再現的速度提升,我們可以通過比較來觀察這一改進(見圖4-2)。
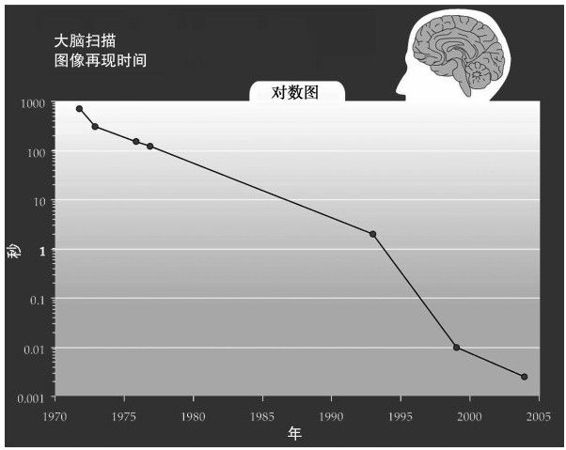
圖 4-2
fMRI是最常用的大腦掃瞄工具,它提供了相對較高的(1~3)毫米的空間分辨率(單個神經元沒有足夠高的圖像),但相對較低的幾秒時間分辨率。當前fMRI技術提供的時間分辨約為1秒,或在掃瞄薄的大腦皮層時十分之一s的分辨率。
另一種常用的技術是MEG,用來測試頭蓋骨(主要由皮質錐體細胞構成)外側的弱磁場,該技術具有較高的時間分辨率(1毫秒),但其空間分辨率卻非常低(約1厘米)。
弗裡茨·薩莫爾,紅木神經科學研究所的首席研究員,正在開發fMRI和MEG相結合的方法,以便提高測量的精度。其他的最新進展表明,fMRI可以映射稱為柱狀和層狀結構的區域,這塊區域是只有1毫米寬的一小部分,檢測任務也只是在幾ms內進行。32
fMRI和使用正電子稱為發射斷層掃瞄(positron-emission tomography,PET)的相關掃瞄技術,都是通過間接的方法測量神經元活動的。PET用來測量局部腦血流量(rCBF),而tMRI測量血氧水平。33雖然血流量和神經活動的關係引起了一些爭議,但還是達成了共識,它們都反映突觸活動,而不是神經元的尖峰。神經活動和血流量關係的第一次明確表達是在19世紀末。34不過,tMRI有一個限制條件——突觸活動之間的血流量關係不是直接的:各種代謝機制對兩種現象的關係都有影響。
然而,無論PET和tMRI都是最適合測量大腦狀態相對變化的可靠方法。它們的主要方法是使用「減法範式」,這種方法可以顯示執行特定任務期間最活躍的區域。35此過程會刪除掃瞄過程不理想時產生的數據,一般都是執行一個指定的精神活動而產生的數據。這些不同顯示了大腦狀態的變化。
「光學成像」是一種提供高時空分辨率的微創技術,其中涉及拆除部分頭蓋骨,在活動神經上用螢光染料對腦組織染色,然後通過影像與數碼相機進行記錄。由於光學成像需要手術,所以這項技術還是主要用於動物實驗,特別是用白鼠實驗。
經顱磁刺激(TMS)是另一種鑒定大腦不同區域具體功能的方法,它通過將一個電磁線圈精確地放置在頭正上方,從頭蓋骨外部增加強脈衝磁場。通過模擬或引發一個大腦微小區域的「虛擬損壞」(使之暫時能力喪失),削弱或提高技能。36 TMS也可以用來學習大腦不同區域具體任務的關係,甚至可以引發腦部神經的活動。37大腦科學家艾倫·斯奈德報告說,她大約40%的測試課題都是關於TMS新技術的,其中有很多成效卓著,如繪圖能力的測試。38
如果在掃瞄時,我們可以選擇摧毀大腦,那麼更高的空間分辨率將成為可能,當前掃瞄一個冷凍的大腦已經成為可能,雖然沒有足夠的速度和帶寬來完整映射所有的相互連接,但當再次依據加速收益法則時,這種潛力就會呈指數增長,就像掃瞄大腦其他面一樣。
卡耐基·梅隆大學的安德裡亞斯·諾瓦特斯用一種精度為200納米的儀器掃瞄小鼠的身體和大腦的神經系統,這已經接近逆向工程所要求的程度。另一種劃時代意義的掃瞄儀是美國賓得克薩斯州A&M大學實驗室開發的「腦組織掃瞄儀」,它能夠在一個月內使用片掃瞄技術掃瞄整個小鼠。39
改進的解決方案。許多新的腦掃瞄技術的發展極大地改善了當前的時空分辨率。新一代傳感和掃瞄系統提供了促進模型發展的工具,這些模型擁有前所未有的細緻程度。以下是這些成像傳感系統的小例子。
一個令人特別興奮的新掃瞄相機正在美國賓夕法尼亞大學的神經工程實驗室進行開發,領導該項目的是Leif H.Pinkel。40這部儀器的空間分辨率已經足夠高,可以形象的繪製單個神經元,時間分辨率將達到1毫秒,可以記錄每個神經元的放電過程。
最初的版本在高達10微米的相機深度下同時掃瞄100個細胞,未來的版本將在150微米深度和亞毫秒級的時間分辨率下同時掃瞄100個細胞。這一系統可以掃瞄體內(在活的大腦中)神經組織,而動物可以進行思維活動,即使大腦表面必須暴露出來。被染色的神經組織隨著電壓的變化產生螢光,這些都可以被高分辨率的數碼相機採集到。掃瞄系統將用於檢查動物學習特殊感知能力之前和之後的大腦。該系統結合了較高的時間分辨率(1ms),又可以形象地表示單個神經元的連接。
這些方法也已發展到無創激活神經細胞中,甚至到了在時間和空間方式上精確神經元的一個特定部分。一種直接使用「雙光子」激勵的方法,稱為「雙光子激光掃瞄顯微鏡」(TPLSM)41。這將在三維空間內創建一個單點焦點,從而實現高分辨率掃瞄。它利用僅僅持續10億分之一秒(10-15秒)的激光脈衝來檢測完整大腦的單一突觸,檢測的方法是通過激活突觸感受器來測量腦細胞內鈣的積累。42這種方法破壞一些微不足道的組織,但卻可以獲得活動中樹突棘和突觸超高分辨率的圖像。
這項技術已經用來執行超精密的細胞內手術。物理學家埃裡克·馬祖爾和他在哈佛大學的同事們一起展示了執行細胞內精密修改的能力,例如切斷神經元之間的連接或在不影響其他血球的情況下毀壞一個線粒體(細胞的能量來源)。「它產生太陽的熱量,」馬祖爾的同事唐納德·英格伯說,「但只有10-30s,而且是在一個很小的空間內。」
另一項稱為「多電極記錄」的技術使用電極組來同時記錄大量高時間分辨率(亞毫秒)的神經活動。43而且,一個稱作二次諧波產生(SHG)顯微鏡的無創技術能夠「學習細胞運動」,這一點是康奈爾大學的一名研究生,項目的領導人員丹尼爾·德貝克解釋的。然而,另一個光學相幹成影(OCI)技術使用相干光(相位相同的光波)來創建細胞簇的全息三維圖像。
使用納米機器人掃瞄。儘管大量從頭蓋骨外側對大腦進行無創掃瞄的手段獲得了快速發展,但要想獲取每一個突出的神經元細節,最好的方法還是從內部對大腦進行掃瞄。到21世紀20年代納米機器人技術將會變得可行,而進行大腦掃瞄會成為它的一個重要應用,先前已經描述過,納米機器人就是人類血細胞大小(7微米~8微米)甚至更小的機器人。44數以十億計的納米機器人可以穿過人類的每一條腦部毛細血管,同時對所有相關的神經元特徵進行掃瞄。採用高速無線通信技術,這些納米機器人可以相互交流,並可以同收集大腦資料庫的計算機進行交流(換句話說,納米機器人和計算機將會處在同一個無線局域網內)。 45
連接納米機器人與生物大腦結構的一個關鍵性的技術挑戰是血腦屏障(blooch-brainbarrier,BBB),19世紀末,科學家們發現當他們往動物的血液中注入藍色染料時,除了脊髓和大腦,動物的所有器官都變成了藍色。於是,他們假想在大腦中有一層屏障,用以保護大腦不受血液中潛在的有毒物質的侵害,這些有毒物質包括細菌、激素、充當神經遞質的化學物質,以及其他毒素。只有氧氣、葡萄糖和某些其他的小分子團可以通過血管進入大腦。
20世紀初的實體解剖學表明,與其他器官中同樣粗細的血管相比,大腦和其他神經系統中的毛細血管壁與內皮細胞結合得更為緊密。最近的研究也表明,BBB是一個十分複雜的系統,該系統中設有准許物質進入大腦的密鑰,例如,我們發現兩類蛋白質,分別叫做zonulin和zot,它們能夠與大腦中的感受器相互作用,從而在特定區域暫時性地打開BBB。這兩種蛋白質在小腸中也有著同樣的工作機理,以此來幫助生物體對葡萄糖和其他營養成分進行吸收。
任何利用納米機器人對大腦進行掃瞄的設計或進行其他與大腦有關的設計都得考慮BBB,考慮到我們未來的能力,在此我將提出一些可行的策略。當然,在未來的25年中,其他的策略也會發展起來。
●一個很容易想到的策略是把納米機器人製造的足夠小以使它能夠通過BBB,但至少從今天的納米技術來看,這不太實用,要想實現這個策略,納米機器人在直徑上要小於等於20納米,這個長度是一百個碳原子的大小。把納米機器人的大小限制到如此程度的同時,也會限制它的功能。
●一個折中的策略是讓納米機器人停留在血液中,同時給它安裝一條機械臂使之能夠透過BBB進入到有神經細胞生存的細胞外液,這可以使納米機器人保持足夠大小來保證它的計算和導航功能。由於幾乎所有的神經元都只佔據一條毛細血管(2~3個細胞寬)的寬度,機器臂只需要達到50微米,而羅伯特·弗蘭茨和其他學者都分析並給出了把機器臂限制到20納米以內的可行性。
●另一種策略是讓納米機器人停留在毛細血管中,然後使用無創掃瞄,例如,Finkel和他的助手設計的一套掃瞄系統,可以達到很高的150微米的掃瞄分辨率(足以看見個體之間的相互連接),這已經超出我們的需求好多倍,很顯然,這種類型的光學成像設計必須足夠微型化(與我們現在的設計相比),但它用到的電荷耦合器件傳感器是能夠支持這種微型化的。
●另一種無創掃瞄會涉及一組發射集中信號的納米機器人,就像雙光子掃瞄儀一樣,另外還有一組納米機器人來接收傳輸。該中介組織的拓撲結構可以通過分析對接收信號的影響來確定。
●由羅伯特·弗蘭茨建議的另一條策略,它包括在BBB中打洞,從血管中退出,然後修復損害,從而在理論上支持納米機器人穿越BBB。由於納米機器人是由鑽石結構的碳構成,所以它遠比生物組織堅硬。弗蘭茨寫道:「要通過細胞之間豐富的組織,就需要一個改進的納米機器人來破壞最少數量的擋在它們前面的細胞間的粘合連接,之後,為了盡量將損壞降低到最小,這些納米機器人必須重新修復粘合連接,就像補上一顆痣一樣。」46
●還有一種方法是根據當代的癌症研究提出的。癌症研究人員選擇性地破壞BBB,從而將破壞癌症的物質運輸到腫瘤的位置抱有很大的興趣。對於BBB,最近的研究表明,它開創了多元響應的先河,其中包括某些蛋白質(如以上所述的那些)、局部高血壓、某些物質的高濃度、微波和其他形式的輻射、感染和各種炎症等。也有一些專門的處理來傳輸所需的物質,如葡萄糖。也有人發現,糖甘露醇會引起內皮細胞暫時萎縮,這時就會提供臨時的血腦屏障缺口。幾個研究小組正在利用這些機制來研究打開BBB的化合物。47即使這些研究旨在研究癌症的治療方法,但類似的方法也可以為納米機器人進行大腦掃瞄和提高我們的心理功能打開成功之路。
●我們可以繞過血液和BBB,將納米機器人注入大腦特定區域中,從而直接訪問神經組織。正如我下面要提及的,新的神經細胞可以從腦室遷移到大腦的其他部分。納米機器人也可以遵循相同的遷移路徑。
●羅伯特·弗蘭茨描述了一些為納米機器人提供的監視感知信號的技術。48這些對於大腦逆向工程的輸入,以及在神經系統內部創建全浸虛擬現實都是很重要的。
●弗蘭茨提出「移動納米器件」來掃瞄和監測聽覺信號……(這些)進入耳朵,通過其螺旋動脈分支到達耳蝸管,然後作為螺旋神經纖維周圍的神經監測器,而神經進入螺旋神經節內的哥蒂氏器官上皮。這些監視器可以進行檢測、記錄或為其他通信網絡中的納米器件轉播所有人耳可以感知的聽覺神經通信。
●對於人體的「重力感應、旋轉、加速,」他設想「放在傳入神經末梢的納米監聽器出自位於……半規管的毛細胞」。
●對於「動物動覺感應管理……運動神經元可以進行監測,以記錄肢體的運動和位置,或特定的肌肉活動,甚至會對此施加控制。」
●「嗅覺和味覺感覺神經信息傳輸可能被納米傳感儀器竊聽[上]。」
●「疼痛信號可能被記錄或根據需要修改,就像來自皮膚感受器的機械和溫度神經衝動……」
●弗蘭茨指出,視網膜擁有豐富的小血管,「允許隨時可以進入光感受器(桿、錐、雙極神經元和神經節)以及集成……神經元。」視神經的信號代表超過每秒一億的水平,但這種信號處理水平已經可以控制。正如麻省理工學院的托馬斯·波吉奧等其他人指出,我們還不瞭解視神經的信號編碼。一旦我們有能力來監視每個離散視神經纖維的信號,這將在很大程度上促進對於這些信號的解釋。這也是目前比較火的一個研究領域。
正如我下面要討論的,身體的原始信號,通過多層加工,方能聚集成動態調節的兩個小器官,這兩個器官稱為左腦島和右腦島,它們位於大腦皮質深處。為實現全浸虛擬現實,更有效的可能是挖掘已經解釋的腦島信號,而不是遍及整個身體的未經處理的信號。
通過掃瞄大腦來實現逆向工程,其工作原理比實現特別屬性的「上傳」要容易,這一點我將在接下來的內容中進一步討論。為了逆向設計大腦,我們只需要掃瞄一個區域內的連接,就足以瞭解它們的基本格局。而且我們並不需要捕捉它的每一個連接。
一旦瞭解了一個區域內的神經通路模式,我們就可以結合這些知識詳細瞭解該區域每個神經元的工作原理。雖然大腦的特定區域可能有幾十億的神經細胞,但它也只是包含數量有限的神經類型。我們已經在很多方面獲得了很大的進展,如通過體外(在測試盤)研究,獲得特殊種類的神經和突觸連接的機制,就像在活的機體內使用雙光子掃瞄一樣。
上述方案涉及的功能至少在當前的早期階段已經存在。我們已經擁有的技術能夠生產高清晰度的掃瞄儀,如果這些掃瞄儀在物理特性上接近於神經,那我們將可以看到特定大腦區域每一連接的精確形狀。而對於納米機器人,已經有四個主要的會議致力於發展血細胞的診斷和治療了。49正如第2章討論的那樣,我們可以預見計算成本的指數下降和規模的迅速下降,以及電子和機械技術效率的提高。基於這些預測,我們可以保守地估計在21世紀20年代實現這些方案所必備的納米機器人技術。一旦基於納米機器人的掃瞄成為現實,我們就將最終和電路設計人員站在同一位置:能夠在大腦數百萬甚至數十億的地點放置高靈敏度且高分辨率的傳感器(以納米機器人的形式),從而見證大腦活動的驚人細節。